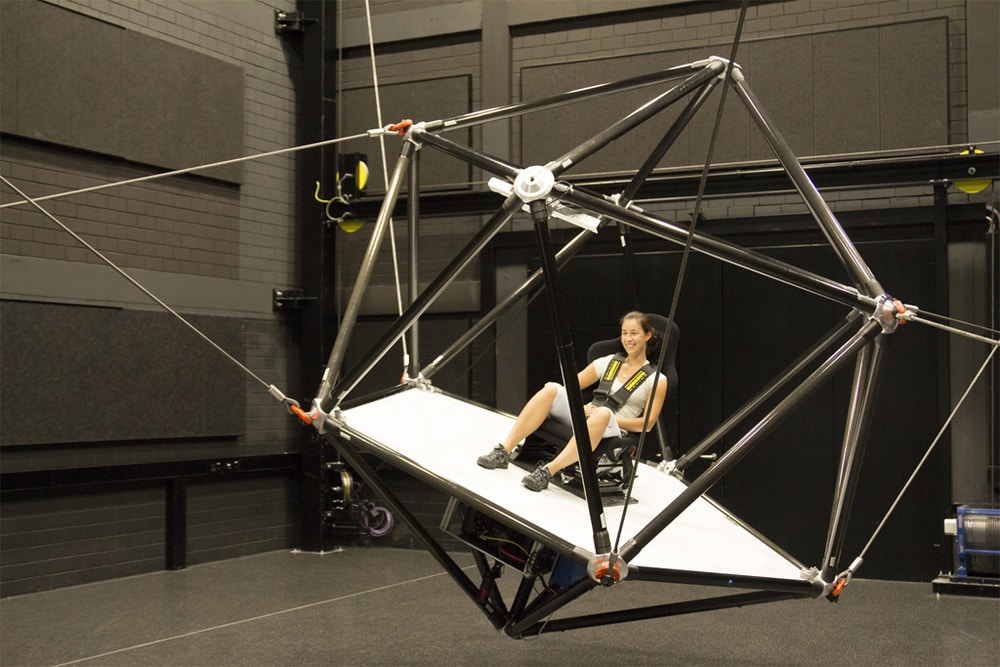
Was auf den ersten Blick wie eine Art Käfig im Spinnennetz aussieht, ist tatsächlich ein CableRobot Simulator, dessen Kabine sich mit der 1,5-fachen Erdbeschleunigung entlang frei programmierbarer Bahnen bewegen kann. Eine tolle Entwicklung für allerlei Anwendungen aus dem Bereich der virtuellen Realität!
Das Kabinendesign, hier in Minimalausführung, ist modular und vielfältig rekonfigurierbar (Bild: Fraunhofer IPA/Philipp Miermeister)
Stolz ist man am Fraunhofer IPA und dem Tübinger Max-Planck-Institut für biologische Kybernetik (MPI) auf den neuen seilgetriebenen Bewegungssimulator. Denn dieser kann als erster Seilroboter überhaupt Menschen transportieren und setzt damit neue Maßstäbe für Arbeitsraum, Beschleunigung und Nutzlast bei Bewegungssimulationen.
Anzeige
Ein perfektes Modul für ein breites Anwendungsspektrum aus dem Bereich der virtuellen Realität! Hierzu zählen zum Beispiel Fahr- und Flugsimulationen sowie die Erforschung grundlegender Wahrnehmungsprozesse beim Menschen. Damit ist den Wissenschaftlern eine entscheidende Weiterentwicklung der Technologie gelungen, die sie bisher für Automatisierungslösungen in der Intralogistik (= die logistischen Material- und Warenflüsse, die sich innerhalb eines Betriebsgeländes abspielen) eingesetzt haben.
Kombinierbar mit Oculus Rift und HTC Vive
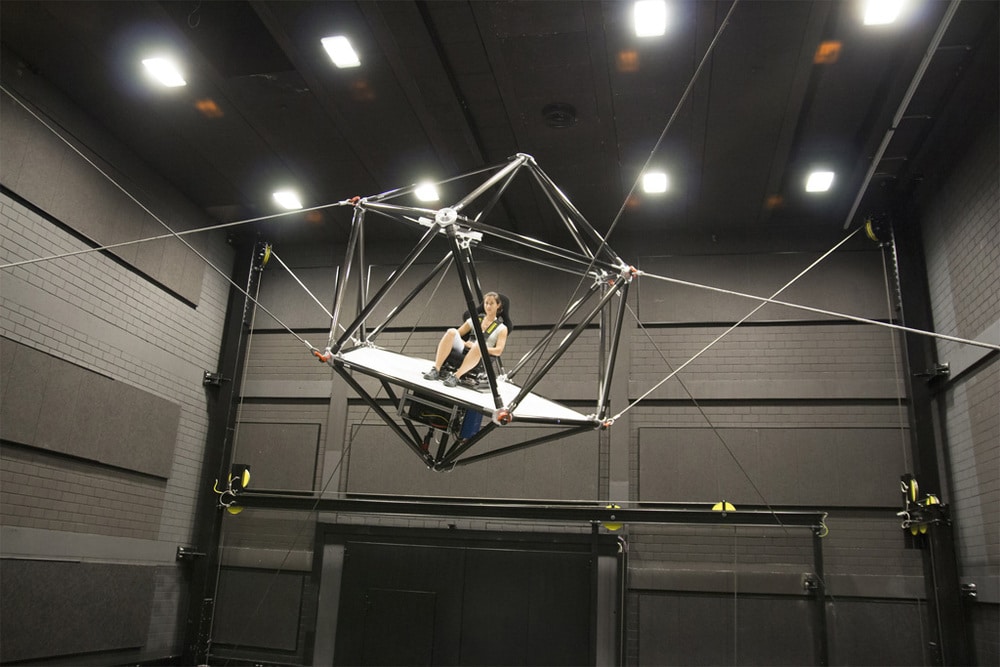
Bei dem Seilsimulator steuern acht im Raum verspannte und an Seilwinden befestigte Stahlseile die Bewegung der Simulatorkabine. Im Gegensatz zu herkömmlichen Bewegungssimulatoren ermöglicht die Verwendung von Seilen, die bewegte Masse zu reduzieren und die Arbeitsräume beliebig zu skalieren. Der nur 80 Kilogramm leichte Kabinenrahmen aus Karbonfaserrohren lässt sich mit einer Antriebsleistung von insgesamt 348 kW sehr schnell beschleunigen und hält große Kräfte aus, denn im Betrieb ziehen die Seile mit bis zu 1,5 Tonnen an der Außenstruktur.
Empfohlen wird ein Aufbau von mindestens 5x5x5 m3 Volumen, um noch genügend Bewegungsfreiraum zu haben. Optimal sind Räume mit 10 bis15 Metern Kantenlänge, was auch dem Aufbau am Max-Planck-Institut entspricht. „Bezüglich der maximalen Größe sehen wir kaum Einschränkungen. Mit dem derzeitigen System wären auch Räume mit 20 Metern Kantenlänge kein Problem“, so Philipp Miermeister, der am MPI und in Zusammenarbeit mit dem Fraunhofer IPA die Konzeption und Umsetzung des Simulators mit viel Know-how vorangetrieben hat.
Die Kabine besteht aus einer sehr flexiblen Struktur, die einen 2,6 Meter großen kugelförmigen Innenraum bietet. Zurzeit befindet sich im Innenraum eine Trägerplatte mit einem Rennsitz; eine Erweiterung um einen zweiten Sitz ist problemlos machbar. Zudem ist ein Visualisierungs- und Trackingsystem untergebracht, das ermöglicht, die Daten für VR-Brillen wie Oculus Rift und HTC Vive aufzubereiten und die Bewegung der Passagiere aufzunehmen.
Für die Verwendung von Projektoren kann eine Kugelschale integriert werden, die als Projektionsfläche dient und eine 270°-Sicht bietet. Zusätzlich kann Instrumentierung wie Joysticks, Pedale etc. mit bis zu 100 kg Gewicht eingebracht werden. „Aktuell planen wir darüber hinaus eine Rotationseinheit, mit der der Sitz unabhängig von der Kabine gedreht werden kann, um ein weiteres Spektrum an Simulationsszenarien abzudecken“, erläutert Miermeister.
Kopplung mit Computerspielen sowie 360°-Filmen
Betrieben wird der Seilroboter mit der am Max-Planck-Institut entwickelten Motion Cueing Software, die es ermöglicht, die Bewegung aus einer Simulation möglichst realistisch abzubilden. Prinzipiell können jedoch alle Simulationen für den Simulator verwendet werden, wenn sie eine Schnittstelle für die Bewegungsdaten und die 3D-Visualisierung bereitstellen. Zurzeit wird auch an der Rekonstruktion von Bewegungen anhand von 360°-3D-Filmmaterial gearbeitet.
Miermeister erklärt: „Bei Kameraaufnahmen werden bisher standardmäßig keine Bewegungsdaten aufgezeichnet, weshalb die Rekonstruktion besonders interessant ist. Durch diese Aufarbeitung des Filmmaterials wird Bewegungssimulation auch für Filme ohne aufgezeichnete Bewegungsdaten möglich.“ Durch die Kopplung mit Computerspielen, wie Renn- und Flugsimulationen, sowie 360°-Filmen kann der CableRobot Simulator für die Präsentation der unterschiedlichsten Inhalte eingesetzt werden.
Leicht und filigran: Der Seilsimulator setzt neue Maßstäbe. (Bild: Fraunhofer IPA/Philipp Miermeister)
Ebenfalls positiv – die Handhabung: Durch das Umhängen der Seile ist der Simulator innerhalb einer Stunde an verschiedene Kabinen anpassbar und lässt sich somit für verschiedene Szenarien nutzen. Dazu Philipp Miermeister: „Wir arbeiten zurzeit an einem Transportkonzept, sodass sich der Simulator in wenigen Tagen auf- und abbauen lässt. Hierbei werden ausschließlich Standardkomponenten aus der Veranstaltungsindustrie verwendet, die ein leichtes Handling durch Rigging-Teams ermöglichen.“
Visualisierungen und Simulationsszenarien selbst gestaltbar
Wer den CableRobot Simulator beim nächsten Event gerne einsetzen möchte, dem sei gesagt, dass man sowohl den Simulator oder auch einzelne VR-Technologiekomponenten kaufen kann. Auch eine Vermietung für Veranstaltungen wird seitens der Institute in Erwägung gezogen. Bei allen Varianten gibt es voraussichtlich die Möglichkeit, Virtual-Reality-Inhalte, Visualisierungen und Simulationsszenarien als fertige, auf den Simulator abgestimmte Lösung zu bekommen oder Teilaspekte selbst zu gestallten. Verhandlungen mit einigen Firmen aus der Film- und Eventindustrie, die den Simulator für VR-Szenarien einsetzen wollen, laufen bereits.
Philipp Miermeister, Forschungsingenieur am Tübinger Max-Planck-Institut für biologische Kybernetik (MPI) (Bild: Fraunhofer IPA/Philipp Miermeister)